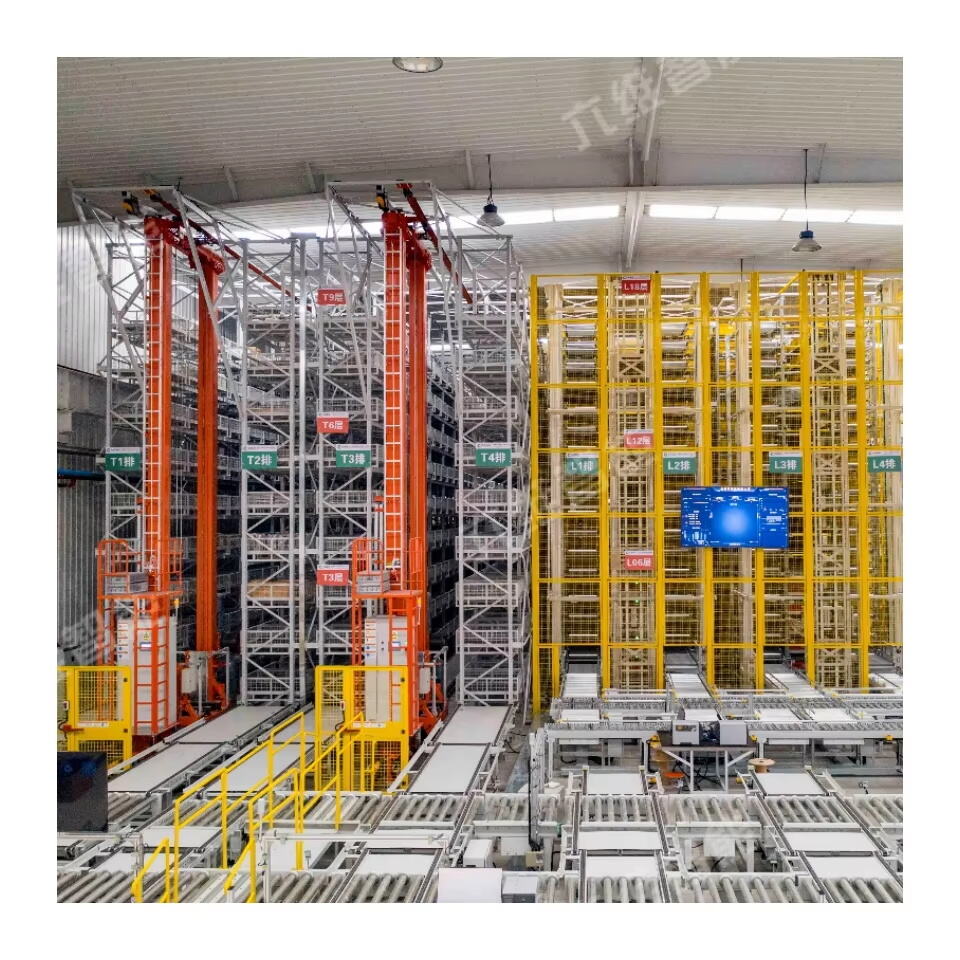
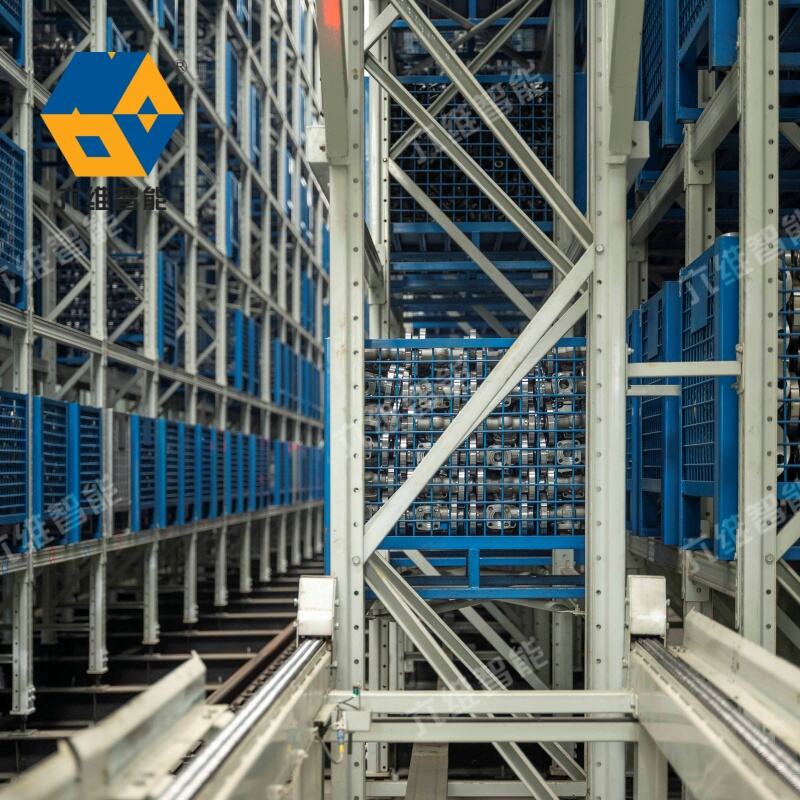
ավտոմատացված պալետային պահեստի և վերցնելու համակարգ
Ավտոմատացված պալետների պահեստային և վերցնող համակարգը ներկայացնում է ստորագրական լուծում ժամանակակից պահեստային վարության մեջ, միացնելով բարդ ռոբոտիկայի և հետազոտական ծրագրերի, որոնք հետաձգուցիչ փոխարինում են նյութերի շարժման գործողությունները։ Այս առաջատար համակարգը օգտագործում է կոմպյուտերով կառավարվող մեքենաներ, ներառյալ ավտոմատացված կրաներ, տրանսպորտատորներ և տարանիշներ, որոնք արդյունավետորեն պահում են և վերցնում են պալետացված ապրանքներ բարձր խտությամբ պահեստային միջավայրում։ Համակարգը գործում է անցուցիչների ցանցով, որոնց մեջ տեղավորված են պահեստային շերտեր, որտեղ ռոբոտական սարքերը հորիզոնական և ուղղագիծ շարժվում են՝ ճշգրիտությամբ արտադրելով պահեստային տեղերին։ Ինտեգրացված սենսորները և դիրքային համակարգերը համոզված են պալետների ճշգրիտ տեղադրման և վերցման համար, իսկ իրական ժամանակի պահեստային վարության ծրագիրը մանրամասն հետևում է բոլոր պահեստացված ապրանքներին։ Համակարգը կարող է գործել տարբեր ամրապնեական պայմաններում, ներառյալ արդարացած պայմաններ, և կարող է սպասարկել տարբեր պալետների չափեր և կշիռներ։ Գերազանց ան전ացման ապահովում են ավարտական անտառներից խուսափող համակարգերը և կրիտիկական դեպքերի պրոտոկոլները։ Տեխնոլոգիան անգամացնում է գործում գոյության պահեստային վարության համակարգերի (WMS) և կազմակերպության ռեսուրսների պլանավորման (ERP) ծրագրերի հետ, ապահովելով իրական ժամանակի տվյալների արտահայտություն և պահեստային վարություն։ Այս համակարգը գտնում է ընդլայնված կիրառություն բազմաթիվ գործունեություններում, ներառյալ կերակրություն և խմի, ավտոմոբայլ և դրամական գործունեությունների բաժներում, որտեղ արդյունավետ տարածքի օգտագործումը և արագ պահեստային շարժումը կարևոր են։